Les algorithmes de graphes et d’arbres sont essentiels dans le domaine de l’informatique et de l’ingénierie des systèmes. Ils sont utilisés pour résoudre une variété de problèmes, tels que la recherche de chemins optimaux, la modélisation de réseaux, l’analyse de données et bien plus encore. Voici quelques-uns des algorithmes les plus célèbres dans ce domaine :
-
Algorithme de Dijkstra : Il s’agit d’un algorithme de recherche de chemin le plus court dans un graphe pondéré et dirigé. Il utilise une approche de programmation dynamique pour trouver le chemin optimal depuis un nœud source vers tous les autres nœuds dans le graphe.

« Link To Share » est votre plateforme de marketing tout-en-un, idéale pour guider votre audience vers tout ce que vous offrez, de manière simple et professionnelle. • Des pages de profil (Bio) modernes et personnalisables • Raccourcissez vos liens grâce à des analyses avancées • Générez des codes QR interactifs à l’image de votre marque • Hébergez des sites statiques et gérez votre code • Des outils web variés pour stimuler votre activité -
Algorithme de Bellman-Ford : Similaire à l’algorithme de Dijkstra, il trouve également les chemins les plus courts dans un graphe pondéré, mais peut gérer les graphes comportant des arêtes de poids négatif, bien qu’il soit moins efficace que Dijkstra dans le cas des graphes positivement pondérés.
-
Algorithme de Kruskal : C’est un algorithme de construction d’un arbre couvrant de poids minimal dans un graphe non dirigé et pondéré. Il fonctionne en sélectionnant successivement les arêtes de poids minimum qui ne créent pas de cycle jusqu’à ce que tous les sommets soient connectés.
-
Algorithme de Prim : Similaire à Kruskal, il trouve également un arbre couvrant de poids minimal, mais il fonctionne en sélectionnant successivement les arêtes de poids minimum qui ajoutent un nouveau nœud à l’arbre couvrant partiel, jusqu’à ce que tous les sommets soient inclus.
-
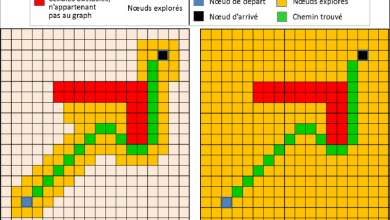
Algorithme A (A-star)* : C’est un algorithme de recherche de chemin heuristique souvent utilisé dans les applications de jeu et de planification de trajectoire. Il combine la recherche en largeur d’abord avec une estimation heuristique du coût pour atteindre le nœud cible.
-
Algorithme de recherche en profondeur (DFS) : Il est utilisé pour parcourir un graphe ou un arbre en explorant autant que possible le long d’une branche avant de reculer. Il est souvent utilisé pour détecter les cycles dans un graphe et pour trouver des solutions dans des structures d’arbre.
-
Algorithme de recherche en largeur (BFS) : Contrairement à DFS, il explore le graphe en largeur avant de passer à la profondeur. Il est souvent utilisé pour trouver le chemin le plus court dans un graphe non pondéré.
-
Algorithme de recherche de chemin à coût uniforme : Aussi connu sous le nom de D’abord le meilleur d’abord (Best First Search), il explore le graphe en évaluant d’abord les nœuds avec le coût le plus faible. Il est utilisé dans des domaines tels que l’intelligence artificielle pour la recherche de chemin dans des environnements dynamiques.
-
Algorithme de Tarjan : C’est un algorithme de recherche des composantes fortement connexes dans un graphe dirigé. Il utilise une méthode de parcours en profondeur pour attribuer des indices à chaque nœud et détecter les cycles.
-
Algorithme de Trie : Il s’agit d’une structure de données arborescente utilisée pour stocker un ensemble dynamique où les clés sont généralement des chaînes de caractères. Il est souvent utilisé pour la recherche de préfixe efficace, comme dans les dictionnaires et les moteurs de recherche.
Ces algorithmes ne représentent qu’un échantillon des nombreuses techniques utilisées dans le domaine des graphes et des arbres en informatique. Ils sont fondamentaux pour de nombreuses applications et constituent un domaine de recherche actif pour développer des méthodes plus efficaces et polyvalentes.
Plus de connaissances

Bien sûr, plongeons un peu plus dans chacun de ces algorithmes pour mieux comprendre leur fonctionnement et leurs applications spécifiques :
-
Algorithme de Dijkstra :
- Il utilise une approche de relaxation pour mettre à jour les chemins les plus courts à partir du nœud source vers tous les autres nœuds.
- Il est largement utilisé dans les systèmes de routage et de planification logistique pour trouver le chemin le plus court entre deux points dans un réseau routier ou de télécommunications.
- La complexité temporelle de l’algorithme de Dijkstra est O(V^2) pour une implémentation naïve et O(E log V) avec une file de priorité, où V représente le nombre de sommets et E le nombre d’arêtes dans le graphe.
-
Algorithme de Bellman-Ford :
- Il peut détecter et signaler la présence de cycles de poids négatif dans le graphe, ce que Dijkstra ne peut pas faire.
- Bien qu’il soit moins efficace que Dijkstra dans le cas des graphes positivement pondérés, il est plus robuste en présence de poids négatifs.
- La complexité temporelle de l’algorithme de Bellman-Ford est O(VE), où V représente le nombre de sommets et E le nombre d’arêtes dans le graphe.
-
Algorithme de Kruskal :
- Il construit un arbre couvrant de poids minimal en sélectionnant les arêtes par ordre croissant de poids.
- Il est utilisé dans des domaines tels que la conception de réseaux de télécommunications et la planification de circuits pour minimiser les coûts.
- La complexité temporelle de l’algorithme de Kruskal est O(E log E), où E représente le nombre d’arêtes dans le graphe.
-
Algorithme de Prim :
- Il commence à partir d’un nœud source et grandit de manière incrémentielle en ajoutant l’arête la plus légère qui relie l’arbre en cours de construction à un nœud non inclus.
- Il est souvent utilisé dans les applications où il est préférable de construire l’arbre couvrant à partir du nœud source.
- La complexité temporelle de l’algorithme de Prim est O(E log V), où V représente le nombre de sommets et E le nombre d’arêtes dans le graphe.
-
Algorithme A (A-star)* :
- Il utilise une fonction heuristique pour estimer le coût restant à parcourir à partir du nœud actuel jusqu’au nœud cible.
- Il est largement utilisé dans les applications de jeu pour la recherche de chemin dans des environnements avec des obstacles et des coûts de déplacement variables.
- La complexité temporelle de l’algorithme A* dépend de la fonction heuristique utilisée, mais elle est généralement en O(b^d), où b est le facteur de branchement et d est la profondeur de la solution optimale.
-
Algorithme de recherche en profondeur (DFS) :
- Il explore autant que possible le long d’une branche avant de reculer et d’explorer d’autres branches.
- Il est utilisé pour parcourir des structures de données arborescentes et pour résoudre des problèmes tels que la recherche de cycles dans un graphe ou la génération de permutations.
- La complexité temporelle de l’algorithme DFS est O(V + E), où V représente le nombre de sommets et E le nombre d’arêtes dans le graphe.
-
Algorithme de recherche en largeur (BFS) :
- Contrairement à DFS, il explore d’abord tous les nœuds voisins du nœud actuel avant de passer à la profondeur suivante.
- Il est utilisé pour trouver le chemin le plus court dans un graphe non pondéré et pour parcourir des structures de données arborescentes de manière systématique.
- La complexité temporelle de l’algorithme BFS est O(V + E), où V représente le nombre de sommets et E le nombre d’arêtes dans le graphe.
Ces algorithmes constituent une base solide pour résoudre une variété de problèmes dans le domaine des graphes et des arbres. Ils sont largement utilisés dans de nombreuses applications informatiques, de la planification de trajets dans les applications de navigation à la modélisation de réseaux complexes dans les systèmes informatiques distribués.